suidouya(水道屋)がMMDとかメタセコとかPMDEとかで色々?
ぬっぽんで書いた何か(5)まだあったのよ冴えたやりかた
2013-08-23 20:03:16
この記事は私が以前に「ぬっぽん」で書いていた事の転載になります。
平成25年4月22日に書いたものです。
さて
「ぴくちぃさんがピクピク」の原因が解ったので”対処の仕方その2”
「まだあったのよ冴えたやり方」ですよ
本当に冴えてるのかどーかとかは全力スルーでどじょw
裏技というか「あんまり広まってない方法」になるのかな?
やり方
1 PMXEなりPMDEなりを起動して目的のモデルを読み込む
今回はPmxEditerで説明しますPmdEdterは読み替えてください
2 PmxViewで 表示(V)→TransformView を起動
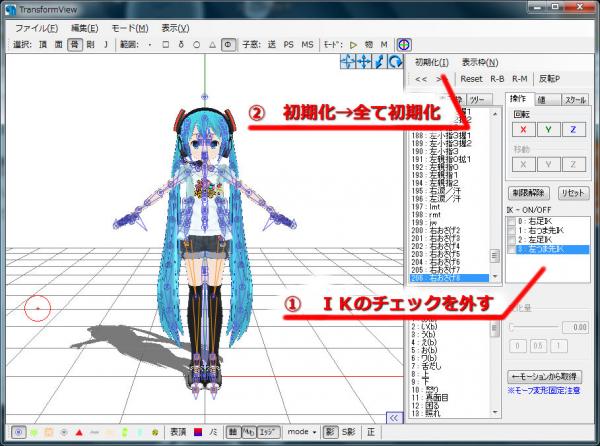
3 IKのチェックを外して 初期化→姿勢の初期化
4 「~ひざ」ボーンを選んで、数値タブからⅩ軸に数値入力して動かす
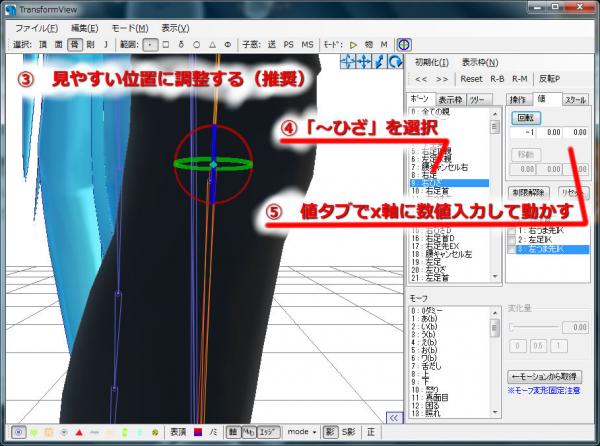
このぴくちぃさんだと"-1"くらいかな?とサックリ
数値タブにしているのは「どれくらい動かしたのかを覚えておきやすくする為なので適当に操作してもオケ
5 反転ペーストするなりして反対側も同じようにしてもらって
6 ファイル→現在の形状で保存
当然別名保存してね?w
いじょ
多少PMDEなりPMXEなりを弄った事がある人なら肩透かしレベルの作業じゃないカナ?
でもこれで改善しちゃうのですw
保存したモデルはIKとターゲットの位置が微妙にズレルのですが、ここがキモです
MMDなりに読み込んでIKが計算を始めると当初のIKに向けて動き出します
で、「ほぼモデル当初の初期位置に納まりつつIKの誘導が出来ている」という状態になるのです・・)b
これの良い点は
1 ボーンと頂点の関係は変わらないので、ウエイト修正は不要
2 素の状態へ戻すのが容易
3 PMXでもPMDでも使える
4 ぶっちゃけ簡単w
何でメジャーにならないのカナ?
まだ利点はあるのです、個人的には最大の利点だと思っているのですが
5 足IKのクセ矯正にも使える
というのがとても美味しいのです・・)b
先の日記で「角度修正はグローバル軸でかかります」ココ重要ですよ
と書いてあったのですが覚えてますでしょうか?
実は、デフォルトで使われるひざの角度制限X=-180~-0.5、Y=0、Z=0だと
足、足首ボーンの位置座標がXでイコールでなければ必ずクセが出ます
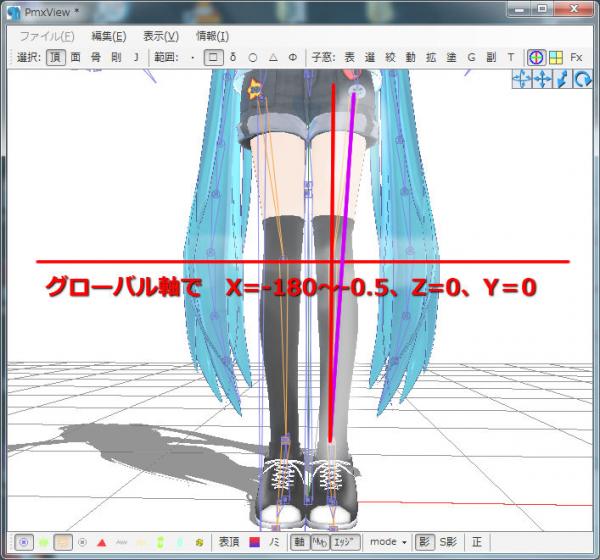
画像を見ると解ると思いますが、足IKに対してバイアスに設定されちゃうからなのです
足と足首がハの字になると内股クセ、逆ハの字になるとガニ股癖が出ます
このあたりはモデルの個性になるのでクセ=NGと言うわけでなく味付けの範囲なのですが
あまり極端な「<>」とか「><」」になっちゃって困る場合もありますね
なんと、上で上げた方法だとこの矯正が出来るのですね・・)b
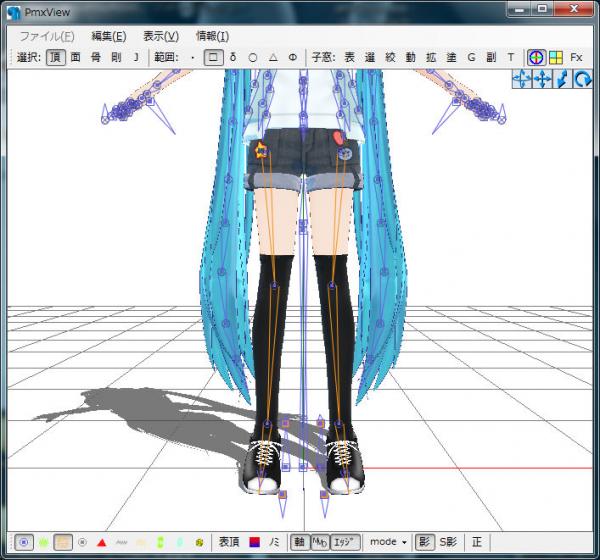
やり方は同様で、足をZ軸に操作して足ボーンと足首ボーンのX軸位置を大まかに揃えてしまうのです
そうするとグローバル軸でかかる角度制限が小さなバイアスになりますから癖が出にくくなります
MMD等で読み込むとその状態で初期姿勢に戻ってくれるという仕組みです
歪んだ平行四辺形とひし形の両端を対角線で曲げる事をイメージしでもらうとわかり易いかな?
応用としては、あえて差をつけてみる、y方向にも捩じってみる」等が考えられますから、IKの角度制限の数値を弄らないでも望む角度制限(クセ)が得られるという事になります
モーション修正するよりこっち修正したほうが早かったりする場合もあるかも??
ぴくちぃ式ミクさんの場合は極端な訳ではないのですが、4度程の狂いがありますので修正してみるのです
足首もチョイトイと
こんな感じですかね
そして、ループ数なんかを調整していきます
足IK ループ55 単位角57度
つま先IK ループ5 単位角45度
くらいが個人的には好みだったのですが「完全に個人の趣味」・・)b
でもま、そんなものですねーw
こでれ一応普通のモーションなら問題ない筈
接地感の為に足首回してるモーションだとグニョルかも?という感じかな
ちなみに、私のモデルのORZシリーズや水道管男君で機械的軸がメッキョリしないようになっているのは
この方法を応用しているのですよ・・)b
こういう方法もあるよ、という紹介でした
これで一通りは説明出来たかな?ワタラネー、と言う方が見えたら補足「出来る事はする」のでコメントでどうぞ
ではまたのネタが湧く頃に、ですです(^^)
平成25年4月22日に書いたものです。
さて
「ぴくちぃさんがピクピク」の原因が解ったので”対処の仕方その2”
「まだあったのよ冴えたやり方」ですよ
本当に冴えてるのかどーかとかは全力スルーでどじょw
裏技というか「あんまり広まってない方法」になるのかな?
やり方
1 PMXEなりPMDEなりを起動して目的のモデルを読み込む
今回はPmxEditerで説明しますPmdEdterは読み替えてください
2 PmxViewで 表示(V)→TransformView を起動
3 IKのチェックを外して 初期化→姿勢の初期化
4 「~ひざ」ボーンを選んで、数値タブからⅩ軸に数値入力して動かす
このぴくちぃさんだと"-1"くらいかな?とサックリ
数値タブにしているのは「どれくらい動かしたのかを覚えておきやすくする為なので適当に操作してもオケ
5 反転ペーストするなりして反対側も同じようにしてもらって
6 ファイル→現在の形状で保存
当然別名保存してね?w
いじょ
多少PMDEなりPMXEなりを弄った事がある人なら肩透かしレベルの作業じゃないカナ?
でもこれで改善しちゃうのですw
保存したモデルはIKとターゲットの位置が微妙にズレルのですが、ここがキモです
MMDなりに読み込んでIKが計算を始めると当初のIKに向けて動き出します
で、「ほぼモデル当初の初期位置に納まりつつIKの誘導が出来ている」という状態になるのです・・)b
これの良い点は
1 ボーンと頂点の関係は変わらないので、ウエイト修正は不要
2 素の状態へ戻すのが容易
3 PMXでもPMDでも使える
4 ぶっちゃけ簡単w
何でメジャーにならないのカナ?
まだ利点はあるのです、個人的には最大の利点だと思っているのですが
5 足IKのクセ矯正にも使える
というのがとても美味しいのです・・)b
先の日記で「角度修正はグローバル軸でかかります」ココ重要ですよ
と書いてあったのですが覚えてますでしょうか?
実は、デフォルトで使われるひざの角度制限X=-180~-0.5、Y=0、Z=0だと
足、足首ボーンの位置座標がXでイコールでなければ必ずクセが出ます
画像を見ると解ると思いますが、足IKに対してバイアスに設定されちゃうからなのです
足と足首がハの字になると内股クセ、逆ハの字になるとガニ股癖が出ます
このあたりはモデルの個性になるのでクセ=NGと言うわけでなく味付けの範囲なのですが
あまり極端な「<>」とか「><」」になっちゃって困る場合もありますね
なんと、上で上げた方法だとこの矯正が出来るのですね・・)b
やり方は同様で、足をZ軸に操作して足ボーンと足首ボーンのX軸位置を大まかに揃えてしまうのです
そうするとグローバル軸でかかる角度制限が小さなバイアスになりますから癖が出にくくなります
MMD等で読み込むとその状態で初期姿勢に戻ってくれるという仕組みです
歪んだ平行四辺形とひし形の両端を対角線で曲げる事をイメージしでもらうとわかり易いかな?
応用としては、あえて差をつけてみる、y方向にも捩じってみる」等が考えられますから、IKの角度制限の数値を弄らないでも望む角度制限(クセ)が得られるという事になります
モーション修正するよりこっち修正したほうが早かったりする場合もあるかも??
ぴくちぃ式ミクさんの場合は極端な訳ではないのですが、4度程の狂いがありますので修正してみるのです
足首もチョイトイと
こんな感じですかね
そして、ループ数なんかを調整していきます
足IK ループ55 単位角57度
つま先IK ループ5 単位角45度
くらいが個人的には好みだったのですが「完全に個人の趣味」・・)b
でもま、そんなものですねーw
こでれ一応普通のモーションなら問題ない筈
接地感の為に足首回してるモーションだとグニョルかも?という感じかな
ちなみに、私のモデルのORZシリーズや水道管男君で機械的軸がメッキョリしないようになっているのは
この方法を応用しているのですよ・・)b
こういう方法もあるよ、という紹介でした
これで一通りは説明出来たかな?ワタラネー、と言う方が見えたら補足「出来る事はする」のでコメントでどうぞ
ではまたのネタが湧く頃に、ですです(^^)