suidouya(水道屋)がMMDとかメタセコとかPMDEとかで色々?
ぬっぽんで書いた何か(4)かくかくするお
2013-08-23 19:46:41
この記事は私が以前に「ぬっぽん」で書いていた事の転載になります。
平成25年4月20日に書いたものです。
やっと角度制限のお話がちょこっと出てきます、カクカクしかじか(いじょ
では終わらないのですねぇ(==)
さて、足IKのひざボーン、腕捩りボーン、手捩りボーンやユーザー設定の角度制限や軸制限は何処に対しての角度なの?
というのを意識された事がある人は少ないんじゃないかな
実はこれ初期姿勢時(モデル読み込み時)のグローバル軸に対してかかっています
ここ重要ですよー・・)b
捩りボーン関係で腕がぐんにょりしちゃうのはこれが原因なんですねー
(”腕捩りボーンでぐんにょり”の回避方法も有るので、こちらはそのうちに日記のネタに)
IKの角度制限も基本グローバルで設定されてしまいます
ボーンの位置関係とか、ボーンのローカル設定とか、軸制限とか関係無しでグローバルでかかりますw
しかも完全に足の位置に依存しなくなるかというとそうでもなくって、微妙に影響があったりという困った仕様の様子
PMD形式の場合は「右ひざ」「左ひざ」のボーン名のIKにMMD側が角度制限をかける仕様になっているので記述する必要は無いのですが
逆に勝手に設定とかは出来ません(普通にやればですがネw)
PMXの場合は足IK設定の「ひざ」に角度制限を付けないとタコ踊りをしだしますw
私は最初これに気が付くまで1月くらい悩んでました(==)
自分で設定しなければならない反面、細かく設定が出来ますから鳥足ロボとかも足IKが組み込めます。
そして、設定されている角度は大抵の場合なんの疑問も無く
X=-180~-0.5、Y=0~0、Z=0~0
という感じの設定をされていると思います
基本何の問題もありません、普通に動く筈です
ですが、たまに上手く動かない場合があります、「カックンカックン」だったり「ヒザが笑って」いたり「踵が埋まる」のが定番かな

あとガニマタ癖、内股癖、足首ペキョリ等々
「足IKがやっつけられないよ」、と言ってる人は多分このどれかのパターン・・)b
で、この問題に、この「ひざの角度制限」と「ひざボーンの位置」というのが大きく関わってきます。
今回のぴくちぃ式ミクさんの場合はほんのちょっとボーンの位置が悪かった。というのが一番の原因でした
「足、ひざ、足首の取る角度がほんの少しだけ180度以上に開いている」
これが「IKは自分が楽なほうにしか動かない」という条件に引っかかってロックします。
大きく足首が沈み込む場合もこれが原因の事が多いです
無理矢理でも曲がってしまえば後は安定して曲がってくれるのですが、その「曲がってみるか伸びてみようか?」と悩んでいるあたりの位置関係でピクピクと振動していたのですね
解決方法で一般的かつ簡単なのは「ひざボーンの位置をちょっと前へずらす事」なのですが、この場合はウエイトが関係してきます。
実際に変形させてみた状態で破綻が起きなければそれで良いのですが、破綻してしまう場合はウエイトの置きなおしが必要になります。
(他にも解決方法はあるので、そちらも後で紹介しますね)
とりあえず今回はこの方法でやってみますネ
1 足ボーンの表示先を足首へ設定します
これがひざ位置のガイドになります。このラインよりもほんのちょっとだけ前にすればいいのです
2 4分割画面の横を大きくしてヒザの位置をガン見します
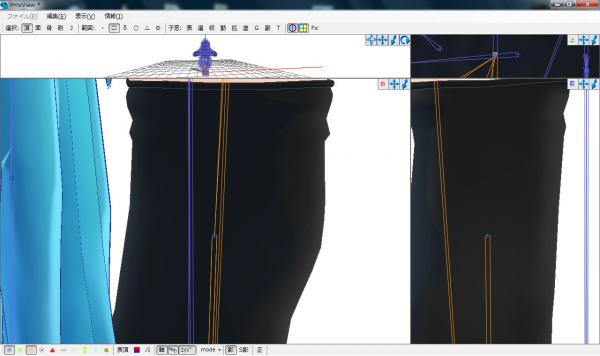
3 ひざ(ぴくちぃさんの場合は「ひざD」も一緒に)を選択して、ちょこっと前に移動
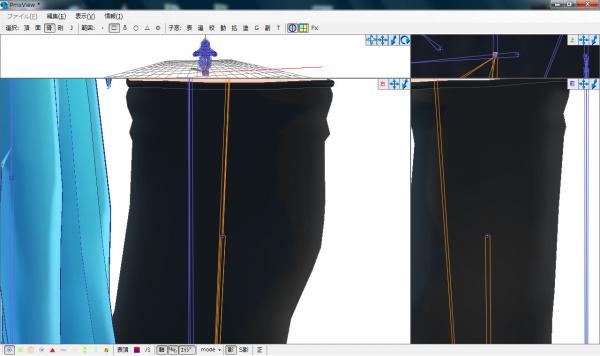
4 足ボーンの表示先をひざへ戻す
5 別名保存で別名保存(大事な事なのでry)
6 確かめてみる(みんな萌えちゃえばいいんだ)
という手順・・)b
結果だけなら
ひざ、ひざDボーンのZを-0.1558609から-0.2080348程度に置き換えればオケ、という事ですね
「0.05程の違い」で「こっちの方が曲がりやすいから曲がれ?いいから曲がれ?」とIKを誘導しやすくなったのです。
これはご自身のPCにお迎えされてるぴくちぃ式ミクさんでも再現可能な筈なので、一回試してみると良いかも・・)b
最初に紹介した動画のモーションでもピクピクしなくなる事は確認出来ました
ただ、この方法は「私は好きじゃ無いw」のと、お膝の癖を取って切れる動きを追求してみたかったり
なので 次回は「まだ有ったりする冴えたやり方」か「アンヨの味付け」とか考えてみたかったりー
…ぺろぺろ?
平成25年4月20日に書いたものです。
やっと角度制限のお話がちょこっと出てきます、カクカクしかじか(いじょ
では終わらないのですねぇ(==)
さて、足IKのひざボーン、腕捩りボーン、手捩りボーンやユーザー設定の角度制限や軸制限は何処に対しての角度なの?
というのを意識された事がある人は少ないんじゃないかな
実はこれ初期姿勢時(モデル読み込み時)のグローバル軸に対してかかっています
ここ重要ですよー・・)b
捩りボーン関係で腕がぐんにょりしちゃうのはこれが原因なんですねー
(”腕捩りボーンでぐんにょり”の回避方法も有るので、こちらはそのうちに日記のネタに)
IKの角度制限も基本グローバルで設定されてしまいます
ボーンの位置関係とか、ボーンのローカル設定とか、軸制限とか関係無しでグローバルでかかりますw
しかも完全に足の位置に依存しなくなるかというとそうでもなくって、微妙に影響があったりという困った仕様の様子
PMD形式の場合は「右ひざ」「左ひざ」のボーン名のIKにMMD側が角度制限をかける仕様になっているので記述する必要は無いのですが
逆に勝手に設定とかは出来ません(普通にやればですがネw)
PMXの場合は足IK設定の「ひざ」に角度制限を付けないとタコ踊りをしだしますw
私は最初これに気が付くまで1月くらい悩んでました(==)
自分で設定しなければならない反面、細かく設定が出来ますから鳥足ロボとかも足IKが組み込めます。
そして、設定されている角度は大抵の場合なんの疑問も無く
X=-180~-0.5、Y=0~0、Z=0~0
という感じの設定をされていると思います
基本何の問題もありません、普通に動く筈です
ですが、たまに上手く動かない場合があります、「カックンカックン」だったり「ヒザが笑って」いたり「踵が埋まる」のが定番かな
埋まってるお
あとガニマタ癖、内股癖、足首ペキョリ等々
「足IKがやっつけられないよ」、と言ってる人は多分このどれかのパターン・・)b
で、この問題に、この「ひざの角度制限」と「ひざボーンの位置」というのが大きく関わってきます。
今回のぴくちぃ式ミクさんの場合はほんのちょっとボーンの位置が悪かった。というのが一番の原因でした
「足、ひざ、足首の取る角度がほんの少しだけ180度以上に開いている」
これが「IKは自分が楽なほうにしか動かない」という条件に引っかかってロックします。
大きく足首が沈み込む場合もこれが原因の事が多いです
無理矢理でも曲がってしまえば後は安定して曲がってくれるのですが、その「曲がってみるか伸びてみようか?」と悩んでいるあたりの位置関係でピクピクと振動していたのですね
解決方法で一般的かつ簡単なのは「ひざボーンの位置をちょっと前へずらす事」なのですが、この場合はウエイトが関係してきます。
実際に変形させてみた状態で破綻が起きなければそれで良いのですが、破綻してしまう場合はウエイトの置きなおしが必要になります。
(他にも解決方法はあるので、そちらも後で紹介しますね)
とりあえず今回はこの方法でやってみますネ
1 足ボーンの表示先を足首へ設定します
これがひざ位置のガイドになります。このラインよりもほんのちょっとだけ前にすればいいのです
2 4分割画面の横を大きくしてヒザの位置をガン見します
3 ひざ(ぴくちぃさんの場合は「ひざD」も一緒に)を選択して、ちょこっと前に移動
4 足ボーンの表示先をひざへ戻す
5 別名保存で別名保存(大事な事なのでry)
6 確かめてみる(みんな萌えちゃえばいいんだ)
という手順・・)b
結果だけなら
ひざ、ひざDボーンのZを-0.1558609から-0.2080348程度に置き換えればオケ、という事ですね
「0.05程の違い」で「こっちの方が曲がりやすいから曲がれ?いいから曲がれ?」とIKを誘導しやすくなったのです。
これはご自身のPCにお迎えされてるぴくちぃ式ミクさんでも再現可能な筈なので、一回試してみると良いかも・・)b
最初に紹介した動画のモーションでもピクピクしなくなる事は確認出来ました
ただ、この方法は「私は好きじゃ無いw」のと、お膝の癖を取って切れる動きを追求してみたかったり
なので 次回は「まだ有ったりする冴えたやり方」か「アンヨの味付け」とか考えてみたかったりー
…ぺろぺろ?